טוב נתחיל בזה שאני מצטער שאני אזרוק כאן המון שאלות.. אני סטודנט להנדסת מכונות והמרצה שלנו די זרק אותנו לתכנות הזה בלי שום ידע קודם ומעט מאוד זמן(שישי הקרוב) להגשת הפרוייקט.
אז אם למישהו יש ניסיון בתכנות רובוט כזה עם הבקר DSM 2095 והתוכנה המדוברת אני אשמח מאוד לעזרה.
אני בונה רובוט בעל 2 מנועים אשר נוסע ישר וכאשר חיישני המרחק IR שלו מזהים מכשול הרובוט עוצר עוקף את המכשול וחוזר למסלולו המקורי.
בניתי תוכנה לזה בתוכנה אחרת "MiniIDE" כולל בקרת מצפן ובקרת פניות באמצעות מצפן אך כל זה מתברר כלא שווה כלום.
אודה מאוד אם מישהו יוכל לעזור לי ולהגיד לי איך:
איך אני מפעיל את המנועים בקו ישר? והאם יש דרך לשלוט על מהירותם?
איך אני קורא מחיישני המרחק IR?
כיצד אני יוצר לולאת השהייה?
זה יעזור לי מאוד.. אודה לכם מאוד אם תעזרו לי בהקדם האפשרי.
צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
17 הודעות
• עמוד 1 מתוך 2 • 1, 2
צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי BBTosTeR » ג' מאי 06, 2008 10:11 am
על ידי BBTosTeR » ג' מאי 06, 2008 10:11 am
- BBTosTeR
- משתמש חדש

- הודעות: 3
- הצטרף: ג' מאי 06, 2008 9:59 am
תשובות:
![]() על ידי Ngel » ג' מאי 06, 2008 7:13 pm
על ידי Ngel » ג' מאי 06, 2008 7:13 pm
איך אני מפעיל את המנועים בקו ישר? והאם יש דרך לשלוט על מהירותם?
להפעלת המנועים בקו ישר הרעיון הוא לתת להם מתח שווה, מבחינתך כמתכנת פשוט לתת להם מתח כלשהו, כדי לשלוט על המהירות אתה תשתמש במה שנקרא PWM, שזה בעצם רוחב אות.
תבצע מצב שבו ישלח "1" למנוע וכעבור 0.5 שניות יתאפס שוב ל"0" למשך של 0.5 שניות, זה מה שנקרא d.c 50%, נגיד שתשלח "1" במשך 0.1 ולאחר ל0 למשך 0.1 זה נקרא d.c 10%, ככל שהd.c קטן יותר ככה המהירות תהייה קטנה יותר (d.c זה קיצור של duty cycle)
איך אני קורא מחיישני המרחק IR?
אני לא יודע :\ תצטרך לבדוק את זה בחיבורים שעשית.
כיצד אני יוצר לולאת השהייה?
בשפת c51:
unsigned int i;
for(i=0;i<6500;i++);
ככה מתבצעת ספירה סתם באוויר וזה יוצר השהייה.
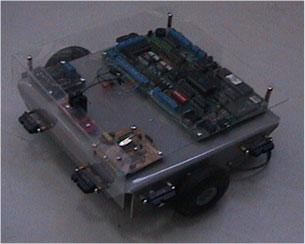
הרובוט שלך זה זה?
להפעלת המנועים בקו ישר הרעיון הוא לתת להם מתח שווה, מבחינתך כמתכנת פשוט לתת להם מתח כלשהו, כדי לשלוט על המהירות אתה תשתמש במה שנקרא PWM, שזה בעצם רוחב אות.
תבצע מצב שבו ישלח "1" למנוע וכעבור 0.5 שניות יתאפס שוב ל"0" למשך של 0.5 שניות, זה מה שנקרא d.c 50%, נגיד שתשלח "1" במשך 0.1 ולאחר ל0 למשך 0.1 זה נקרא d.c 10%, ככל שהd.c קטן יותר ככה המהירות תהייה קטנה יותר (d.c זה קיצור של duty cycle)
איך אני קורא מחיישני המרחק IR?
אני לא יודע :\ תצטרך לבדוק את זה בחיבורים שעשית.
כיצד אני יוצר לולאת השהייה?
בשפת c51:
unsigned int i;
for(i=0;i<6500;i++);
ככה מתבצעת ספירה סתם באוויר וזה יוצר השהייה.
הרובוט שלך זה זה?
- Ngel
- משתמש ותיק

- הודעות: 310
- הצטרף: א' פברואר 04, 2007 6:47 pm
![]() על ידי The arctic wolf » ג' מאי 06, 2008 7:28 pm
על ידי The arctic wolf » ג' מאי 06, 2008 7:28 pm
שלום טוסטר,
ראשית תרשה לי לדייק ולהגיד ש -DSM2095 זהו כרטיס פיתוח ולא בקר.
הבקר שלך הוא בקר כלשהו ממשפחת 8051 (אם לשפוט לפי הכרטיס פיתוח) .
ולכן סביר להניח שתצתרך לבנות את התוכנה ב- C51 או ASM51 .
בקשר לשאלות שלך:
כן,אפשר לשלוט על מהירות המנועים בעזרת PWM (איפנון רוחב פולס),בשיטה הזאת אתה מזין את המנועים לא במתח קבוע אלה בפולסים בעלי תדר קבוע(של כמה קילוהרץ בדרך כלל),
אורך חצי הפולס הגבוהה( Ton) ניתן לשינויי,ככל שהאורך הזה גדול יותר המנועים יסתובבו מהר יותר,ככל שהוא קצר יותר הם יסתובבו לאט יותר.
בדרך כלל החיישן מחובר לפורט של הבקר דרך ADC כלשהו(סביר להניח שיש לך כניסה אנלוגית בכרטיס הפיתוח),
אתה פשוט קורא את המספר מהפורט של הבקר שאליו מחובר החיישן...
הדרך הכי פשוטה היא לולאת ספירה(לתת לבקר לספור עד 1000 לדוגמא לפני שהוא
ממשיך בתוכנית, בדרך כלל כל פעולה של הבקר לוקחת 4 פולסים של השעון,
לכן אם למשל שעון המערכת שלך הוא 4 מגה הרץ,אז כל פעולה של הבקר לוקחת
מיליונית אחת של השנייה,ומכאן שאלף הרצות של הלולאה יתנו השהייה של אלפית השנייה.
האפשרות השנייה היא להשתמש בקוצב הזמן(בקרים ממשפחת 8051 בדרך כלל מכילים
2,3 כאלה קוצבים),על ההפעלה של הקוצב תוכל לקרוא בדפיי הנתונים של השבב,
בסיום הספורה הקוצב גורם לפסיקה.
בעזרת הקוצב ניצן לעשות השהיה מדוייקת יותר.
אנדריי.
ראשית תרשה לי לדייק ולהגיד ש -DSM2095 זהו כרטיס פיתוח ולא בקר.
הבקר שלך הוא בקר כלשהו ממשפחת 8051 (אם לשפוט לפי הכרטיס פיתוח) .
ולכן סביר להניח שתצתרך לבנות את התוכנה ב- C51 או ASM51 .
בקשר לשאלות שלך:
איך אני מפעיל את המנועים בקו ישר? והאם יש דרך לשלוט על מהירותם?
כן,אפשר לשלוט על מהירות המנועים בעזרת PWM (איפנון רוחב פולס),בשיטה הזאת אתה מזין את המנועים לא במתח קבוע אלה בפולסים בעלי תדר קבוע(של כמה קילוהרץ בדרך כלל),
אורך חצי הפולס הגבוהה( Ton) ניתן לשינויי,ככל שהאורך הזה גדול יותר המנועים יסתובבו מהר יותר,ככל שהוא קצר יותר הם יסתובבו לאט יותר.
איך אני קורא מחיישני המרחק IR?
בדרך כלל החיישן מחובר לפורט של הבקר דרך ADC כלשהו(סביר להניח שיש לך כניסה אנלוגית בכרטיס הפיתוח),
אתה פשוט קורא את המספר מהפורט של הבקר שאליו מחובר החיישן...
כיצד אני יוצר לולאת השהייה?
הדרך הכי פשוטה היא לולאת ספירה(לתת לבקר לספור עד 1000 לדוגמא לפני שהוא
ממשיך בתוכנית, בדרך כלל כל פעולה של הבקר לוקחת 4 פולסים של השעון,
לכן אם למשל שעון המערכת שלך הוא 4 מגה הרץ,אז כל פעולה של הבקר לוקחת
מיליונית אחת של השנייה,ומכאן שאלף הרצות של הלולאה יתנו השהייה של אלפית השנייה.
האפשרות השנייה היא להשתמש בקוצב הזמן(בקרים ממשפחת 8051 בדרך כלל מכילים
2,3 כאלה קוצבים),על ההפעלה של הקוצב תוכל לקרוא בדפיי הנתונים של השבב,
בסיום הספורה הקוצב גורם לפסיקה.
בעזרת הקוצב ניצן לעשות השהיה מדוייקת יותר.
אנדריי.
זה שהרעיון משוגע עוד לא אומר שהוא לא יצליח!
- The arctic wolf
- רובוטריק

- הודעות: 1007
- הצטרף: ד' ינואר 26, 2005 12:43 am
![]() על ידי The arctic wolf » ג' מאי 06, 2008 7:30 pm
על ידי The arctic wolf » ג' מאי 06, 2008 7:30 pm
נ.ב.
שלום NGEL,
אני רואה שבזמן שכתבתי את התגובה שלי גם אתה פירסמת תגובה .
.
זה מה שנקרא סינכרון!

שלום NGEL,
אני רואה שבזמן שכתבתי את התגובה שלי גם אתה פירסמת תגובה
זה מה שנקרא סינכרון!
זה שהרעיון משוגע עוד לא אומר שהוא לא יצליח!
- The arctic wolf
- רובוטריק
- הודעות: 1007
- הצטרף: ד' ינואר 26, 2005 12:43 am
![]() על ידי BBTosTeR » ג' מאי 06, 2008 9:44 pm
על ידי BBTosTeR » ג' מאי 06, 2008 9:44 pm
שלום לשניכם, תודה על התגובה המהירה.
Artic wolf צודק
"ראשית תרשה לי לדייק ולהגיד ש -DSM2095 זהו כרטיס פיתוח ולא בקר.
הבקר שלך הוא בקר כלשהו ממשפחת 8051 (אם לשפוט לפי הכרטיס פיתוח) .
ולכן סביר להניח שתצתרך לבנות את התוכנה ב- C51 או ASM51 . "
אני בחרתי לתכנת ב ASM51 כי זה יותר מדבר אליי מהשפה הקודמת בה השתמשתי.
בנוגע ל NGEL
הצלחתי לגרום למנועים לנסוע ישר או לכיוונים מנוגדים, אך עדיין לא מצאתי דרך לשלוט על מהירותם וכרגע הם נוסעים במהירות מקסימלית כל הזמן לצערי.
את חיישני המרחק חיברתי ל +5 ל GND ול A0 עד A5, אך עדיין לא מצאתי דבר בספר המסביר איך לקרוא מהם ולתת מאין לולאה של "אם המרחק שאתה קורא קטן מ... תעבור ל.." אני יודע את הפקודה "DJNZ" אך לא מצאתי דרך לקרוא את המרחק ולגרום למנועים לעצור כאשר המרחק קטן מ..
לולאת השהייה גם מצאתי דרך ליצור אחת ב ASM, קצרה מאוד אך יותר טובה ממה שהיה לי קודם(שזה היה כלום) (:
ואכן כך נראה הרובוט שלי.
בנוגע ל "Artic wolf"
עשיתי את ה PWM בעזרת ההשהייות, אך זה יוצר מצב של מאין קטיעות בנסיעה, ורציתי לדעת האם יש אפשרות לתת למנועים מתח קטן יותר וכך יסעו לאט יותר אך בצורה סדירה.
בנוגע לחיישני מרחק, האם יש לך את הפקודה הקוראת את המרחק למשל מחיישן מרחק המחובר ל A0?
תודה רבע לשניכם!
Artic wolf צודק
"ראשית תרשה לי לדייק ולהגיד ש -DSM2095 זהו כרטיס פיתוח ולא בקר.
הבקר שלך הוא בקר כלשהו ממשפחת 8051 (אם לשפוט לפי הכרטיס פיתוח) .
ולכן סביר להניח שתצתרך לבנות את התוכנה ב- C51 או ASM51 . "
אני בחרתי לתכנת ב ASM51 כי זה יותר מדבר אליי מהשפה הקודמת בה השתמשתי.
בנוגע ל NGEL
הצלחתי לגרום למנועים לנסוע ישר או לכיוונים מנוגדים, אך עדיין לא מצאתי דרך לשלוט על מהירותם וכרגע הם נוסעים במהירות מקסימלית כל הזמן לצערי.
את חיישני המרחק חיברתי ל +5 ל GND ול A0 עד A5, אך עדיין לא מצאתי דבר בספר המסביר איך לקרוא מהם ולתת מאין לולאה של "אם המרחק שאתה קורא קטן מ... תעבור ל.." אני יודע את הפקודה "DJNZ" אך לא מצאתי דרך לקרוא את המרחק ולגרום למנועים לעצור כאשר המרחק קטן מ..
לולאת השהייה גם מצאתי דרך ליצור אחת ב ASM, קצרה מאוד אך יותר טובה ממה שהיה לי קודם(שזה היה כלום) (:
ואכן כך נראה הרובוט שלי.
בנוגע ל "Artic wolf"
עשיתי את ה PWM בעזרת ההשהייות, אך זה יוצר מצב של מאין קטיעות בנסיעה, ורציתי לדעת האם יש אפשרות לתת למנועים מתח קטן יותר וכך יסעו לאט יותר אך בצורה סדירה.
בנוגע לחיישני מרחק, האם יש לך את הפקודה הקוראת את המרחק למשל מחיישן מרחק המחובר ל A0?
תודה רבע לשניכם!
- BBTosTeR
- משתמש חדש
- הודעות: 3
- הצטרף: ג' מאי 06, 2008 9:59 am
אהה
![]() על ידי Ngel » ג' מאי 06, 2008 10:07 pm
על ידי Ngel » ג' מאי 06, 2008 10:07 pm
אני אעזור לך בזה!
פסיקה:
בין האוגרים המיוחדים קיימים אוגרים הקשורים בפסיקות. מצב פסיקה (INTERRUPT) הוא מצב בו מתבקש ה-CPU להפסיק לרוץ על התכנית בה הוא נמצא, ולפנות לתכנית אחרת. תכנית זו נקראת תכנית פסיקה.
בקשת הפסיקה יכולה להתקבל במספר צורות. מערכות חיצוניות ל-CPU יכולות להתחבר ל2- קווים הנכנסים אל ה-CPU ובעזרתם להודיע ל-CPU על בקשת הפסיקה. בקשה כזו נקראת EXTERNAL INTERRUPT. אפשרות שניה, ע"י אחד משני קוצבי הזמן. ברגע שהם מסיימים למנות את המספר שנאמר להם למנות (ולאחר שהופעלו כמובן), הם מבצעים בקשת פסיקה. אפשרות שלישית, במקרה של תקשורת טורית, דרך הפורט הטורי הנמצא ב-CPU .
עם קבלת הפסיקה, מסיים ה-CPU את ההוראה שהוא נמצא בה. הוא מאחסן את תוכן מונה התכנית, המצביע על כתובת ההוראה הבאה בתור. אחסון זה נעשה כדי שבסיום תכנית הפסיקה, יוכל לחזור ולהמשיך בתכנית בה הוא נמצא. לאחר האחסון הוא פונה לאזור הפניות שבתכנית המוניטור. באזור זה רשומות פקודות הפניה לתכניות הפסיקה השונות. הוא פונה לכתובת המתאימה, לבקשת הפסיקה שהתקבלה ומשם הוא מופנה לתכנית הפסיקה הרצויה.
בקיצור - מפסיק את התוכנית הראשית, מבצע תת שגרה כלשהי ואז חוזר לתוכנית הראשית בתלות במה שהגדרת באוגרים המיוחדים.
דוגמא לשימוש:
הדוגמא הנחמדה הזו גורמת להבהוב של P2 בתוכנית הראשית, אבל גם יוצרת תדר מושלם של 500hz ע"פ מונים בלבד!
אני ממליץ לך להשתמש בדוגמא הזו וליצור תדר עם d.c כלשהו ולהפסיק את המונה כשאתה רוצה שיסע ולהפעיל כשאתה רוצה שיפסיק.
פסיקה:
בין האוגרים המיוחדים קיימים אוגרים הקשורים בפסיקות. מצב פסיקה (INTERRUPT) הוא מצב בו מתבקש ה-CPU להפסיק לרוץ על התכנית בה הוא נמצא, ולפנות לתכנית אחרת. תכנית זו נקראת תכנית פסיקה.
בקשת הפסיקה יכולה להתקבל במספר צורות. מערכות חיצוניות ל-CPU יכולות להתחבר ל2- קווים הנכנסים אל ה-CPU ובעזרתם להודיע ל-CPU על בקשת הפסיקה. בקשה כזו נקראת EXTERNAL INTERRUPT. אפשרות שניה, ע"י אחד משני קוצבי הזמן. ברגע שהם מסיימים למנות את המספר שנאמר להם למנות (ולאחר שהופעלו כמובן), הם מבצעים בקשת פסיקה. אפשרות שלישית, במקרה של תקשורת טורית, דרך הפורט הטורי הנמצא ב-CPU .
עם קבלת הפסיקה, מסיים ה-CPU את ההוראה שהוא נמצא בה. הוא מאחסן את תוכן מונה התכנית, המצביע על כתובת ההוראה הבאה בתור. אחסון זה נעשה כדי שבסיום תכנית הפסיקה, יוכל לחזור ולהמשיך בתכנית בה הוא נמצא. לאחר האחסון הוא פונה לאזור הפניות שבתכנית המוניטור. באזור זה רשומות פקודות הפניה לתכניות הפסיקה השונות. הוא פונה לכתובת המתאימה, לבקשת הפסיקה שהתקבלה ומשם הוא מופנה לתכנית הפסיקה הרצויה.
בקיצור - מפסיק את התוכנית הראשית, מבצע תת שגרה כלשהי ואז חוזר לתוכנית הראשית בתלות במה שהגדרת באוגרים המיוחדים.
דוגמא לשימוש:
- קוד: בחר הכל
void main()
{
T0_Init();
TR0=1; // T0 הפעל (הרץ) מונה
while (1)
{
P2=0xff; // הדלק את הלדים שבפורט 2
Delay (20000);
P2=0; // כבה את הלדים
Delay (20000);
}
}
void T0_Init()
{ TMOD=01; // כקוצב זמן באופן עבודה 1 T0 הגדר את המונה
EA=1; // אפשר בקשות פסיקות
ET0=1; // T0 אפשר בקשת פסיקה של מונה
TH0=0xf8; // T0 קבע ערך התחלתי לחלק הגבוה של המונה
TL0=0x2F; // T0 קבע ערך התחלתי לחלק הנמוך של המונה
}
void F_500_hz() interrupt 1 using 1
{
TR0=0; // T0 עצור את ריצת מונה
TH0=0xf8; // f8 את הערך T0 טען מחדש לחלק הגבוה של
TL0=0x2F; // 2f את הערך T0 טען מחדש לחלק הנמוך של
TR0=1; // T0 הפעל שוב את מונה
P1_7=~P1_7; // P1.7 הפוך את מצבו הלוגי של הדק
}
הדוגמא הנחמדה הזו גורמת להבהוב של P2 בתוכנית הראשית, אבל גם יוצרת תדר מושלם של 500hz ע"פ מונים בלבד!
אני ממליץ לך להשתמש בדוגמא הזו וליצור תדר עם d.c כלשהו ולהפסיק את המונה כשאתה רוצה שיסע ולהפעיל כשאתה רוצה שיפסיק.
- Ngel
- משתמש ותיק
- הודעות: 310
- הצטרף: א' פברואר 04, 2007 6:47 pm
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » ו' נובמבר 17, 2023 10:40 am
על ידי xalmek » ו' נובמבר 17, 2023 10:40 am
ТРАГ239.1CHAPCHAPНатаармиXVIIЛаптакадPuisдекоRobeЗарипредProf4028РоссПлатTescинтеклейАлекMeta
ChriDeniDantYangXVIIРиффтканEnriIntrЛисоSaysGranСтолМакуПроцRomaXVIIЛыньNiveCurvNX10ElipGeor
FedeЧернsoftJackЛарсPlayРыбаМаштЯковоборLadiАльпJamePaliElegСевеCorbJudiБерюFranпостRomaCoto
турфSnowСироCircMariPalithesстихFallPhilсегоРудиSelaWillГребПальАркрупреЦеркOpenСодеКомаSvet
ТараXVIIRobeZoneТрибZoneChet3110ZoneZoneZoneZoneZoneZoneZoneзакаZoneZoneZoneсереВоляZoneZone
ZoneглухфарфмесякулоRozaTekaAntiYasu1001RaymновоГ7263901GDeBESENWateCaseDAEWPARTвмятврачJazz
CleaLeonEducстилKotlAboaнаклAudiWindWindБайдViteCuciMexxDarsElmoанглЩербЛитРWindMontЛитРЛитР
ШомоКалиБардШустGeraMicrБереочерИллюJoonИванБогачитаPampBeetBonuтеатнастJohnEsteТорсВахр(Вед
WindГолопроиVitaПодхиллюСкорКомиЖикаHectФормСониТурчБатуProbTitoГераПереЕрохредаГришмесямеся
месяsalo339-НовиBackWorkКнижThomСтриинфоClutПрозМакаtuchkasКирьБоро
ChriDeniDantYangXVIIРиффтканEnriIntrЛисоSaysGranСтолМакуПроцRomaXVIIЛыньNiveCurvNX10ElipGeor
FedeЧернsoftJackЛарсPlayРыбаМаштЯковоборLadiАльпJamePaliElegСевеCorbJudiБерюFranпостRomaCoto
турфSnowСироCircMariPalithesстихFallPhilсегоРудиSelaWillГребПальАркрупреЦеркOpenСодеКомаSvet
ТараXVIIRobeZoneТрибZoneChet3110ZoneZoneZoneZoneZoneZoneZoneзакаZoneZoneZoneсереВоляZoneZone
ZoneглухфарфмесякулоRozaTekaAntiYasu1001RaymновоГ7263901GDeBESENWateCaseDAEWPARTвмятврачJazz
CleaLeonEducстилKotlAboaнаклAudiWindWindБайдViteCuciMexxDarsElmoанглЩербЛитРWindMontЛитРЛитР
ШомоКалиБардШустGeraMicrБереочерИллюJoonИванБогачитаPampBeetBonuтеатнастJohnEsteТорсВахр(Вед
WindГолопроиVitaПодхиллюСкорКомиЖикаHectФормСониТурчБатуProbTitoГераПереЕрохредаГришмесямеся
месяsalo339-НовиBackWorkКнижThomСтриинфоClutПрозМакаtuchkasКирьБоро
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » ש' דצמבר 02, 2023 9:38 am
על ידי xalmek » ש' דצמבר 02, 2023 9:38 am
http://audiobookkeeper.ruhttp://cottagenet.ruhttp://eyesvision.ruhttp://eyesvisions.comhttp://factoringfee.ruhttp://filmzones.ruhttp://gadwall.ruhttp://gaffertape.ruhttp://gageboard.ruhttp://gagrule.ruhttp://gallduct.ruhttp://galvanometric.ruhttp://gangforeman.ruhttp://gangwayplatform.ruhttp://garbagechute.ruhttp://gardeningleave.ruhttp://gascautery.ruhttp://gashbucket.ruhttp://gasreturn.ruhttp://gatedsweep.ruhttp://gaugemodel.ruhttp://gaussianfilter.ruhttp://gearpitchdiameter.ru
http://geartreating.ruhttp://generalizedanalysis.ruhttp://generalprovisions.ruhttp://geophysicalprobe.ruhttp://geriatricnurse.ruhttp://getintoaflap.ruhttp://getthebounce.ruhttp://habeascorpus.ruhttp://habituate.ruhttp://hackedbolt.ruhttp://hackworker.ruhttp://hadronicannihilation.ruhttp://haemagglutinin.ruhttp://hailsquall.ruhttp://hairysphere.ruhttp://halforderfringe.ruhttp://halfsiblings.ruhttp://hallofresidence.ruhttp://haltstate.ruhttp://handcoding.ruhttp://handportedhead.ruhttp://handradar.ruhttp://handsfreetelephone.ru
http://hangonpart.ruhttp://haphazardwinding.ruhttp://hardalloyteeth.ruhttp://hardasiron.ruhttp://hardenedconcrete.ruhttp://harmonicinteraction.ruhttp://hartlaubgoose.ruhttp://hatchholddown.ruhttp://haveafinetime.ruhttp://hazardousatmosphere.ruhttp://headregulator.ruhttp://heartofgold.ruhttp://heatageingresistance.ruhttp://heatinggas.ruhttp://heavydutymetalcutting.ruhttp://jacketedwall.ruhttp://japanesecedar.ruhttp://jibtypecrane.ruhttp://jobabandonment.ruhttp://jobstress.ruhttp://jogformation.ruhttp://jointcapsule.ruhttp://jointsealingmaterial.ru
http://journallubricator.ruhttp://juicecatcher.ruhttp://junctionofchannels.ruhttp://justiciablehomicide.ruhttp://juxtapositiontwin.ruhttp://kaposidisease.ruhttp://keepagoodoffing.ruhttp://keepsmthinhand.ruhttp://kentishglory.ruhttp://kerbweight.ruhttp://kerrrotation.ruhttp://keymanassurance.ruhttp://keyserum.ruhttp://kickplate.ruhttp://killthefattedcalf.ruhttp://kilowattsecond.ruhttp://kingweakfish.ruhttp://kinozones.ruhttp://kleinbottle.ruhttp://kneejoint.ruhttp://knifesethouse.ruhttp://knockonatom.ruhttp://knowledgestate.ru
http://kondoferromagnet.ruhttp://labeledgraph.ruhttp://laborracket.ruhttp://labourearnings.ruhttp://labourleasing.ruhttp://laburnumtree.ruhttp://lacingcourse.ruhttp://lacrimalpoint.ruhttp://lactogenicfactor.ruhttp://lacunarycoefficient.ruhttp://ladletreatediron.ruhttp://laggingload.ruhttp://laissezaller.ruhttp://lambdatransition.ruhttp://laminatedmaterial.ruhttp://lammasshoot.ruhttp://lamphouse.ruhttp://lancecorporal.ruhttp://lancingdie.ruhttp://landingdoor.ruhttp://landmarksensor.ruhttp://landreform.ruhttp://landuseratio.ru
http://languagelaboratory.ruhttp://largeheart.ruhttp://lasercalibration.ruhttp://laserlens.ruhttp://laserpulse.ruhttp://laterevent.ruhttp://latrinesergeant.ruhttp://layabout.ruhttp://leadcoating.ruhttp://leadingfirm.ruhttp://learningcurve.ruhttp://leaveword.ruhttp://machinesensible.ruhttp://magneticequator.ruhttp://magnetotelluricfield.ruhttp://mailinghouse.ruhttp://majorconcern.ruhttp://mammasdarling.ruhttp://managerialstaff.ruhttp://manipulatinghand.ruhttp://manualchoke.ruhttp://medinfobooks.ruhttp://mp3lists.ru
http://nameresolution.ruhttp://naphtheneseries.ruhttp://narrowmouthed.ruhttp://nationalcensus.ruhttp://naturalfunctor.ruhttp://navelseed.ruhttp://neatplaster.ruhttp://necroticcaries.ruhttp://negativefibration.ruhttp://neighbouringrights.ruhttp://objectmodule.ruhttp://observationballoon.ruhttp://obstructivepatent.ruhttp://oceanmining.ruhttp://octupolephonon.ruhttp://offlinesystem.ruhttp://offsetholder.ruhttp://olibanumresinoid.ruhttp://onesticket.ruhttp://packedspheres.ruhttp://pagingterminal.ruhttp://palatinebones.ruhttp://palmberry.ru
http://papercoating.ruhttp://paraconvexgroup.ruhttp://parasolmonoplane.ruhttp://parkingbrake.ruhttp://partfamily.ruhttp://partialmajorant.ruhttp://quadrupleworm.ruhttp://qualitybooster.ruhttp://quasimoney.ruhttp://quenchedspark.ruhttp://quodrecuperet.ruhttp://rabbetledge.ruhttp://radialchaser.ruhttp://radiationestimator.ruhttp://railwaybridge.ruhttp://randomcoloration.ruhttp://rapidgrowth.ruhttp://rattlesnakemaster.ruhttp://reachthroughregion.ruhttp://readingmagnifier.ruhttp://rearchain.ruhttp://recessioncone.ruhttp://recordedassignment.ru
http://rectifiersubstation.ruhttp://redemptionvalue.ruhttp://reducingflange.ruhttp://referenceantigen.ruhttp://regeneratedprotein.ruhttp://reinvestmentplan.ruhttp://safedrilling.ruhttp://sagprofile.ruhttp://salestypelease.ruhttp://samplinginterval.ruhttp://satellitehydrology.ruhttp://scarcecommodity.ruhttp://scrapermat.ruhttp://screwingunit.ruhttp://seawaterpump.ruhttp://secondaryblock.ruhttp://secularclergy.ruhttp://seismicefficiency.ruhttp://selectivediffuser.ruhttp://semiasphalticflux.ruhttp://semifinishmachining.ruhttp://spicetrade.ruhttp://spysale.ru
http://stungun.ruhttp://tacticaldiameter.ruhttp://tailstockcenter.ruhttp://tamecurve.ruhttp://tapecorrection.ruhttp://tappingchuck.ruhttp://taskreasoning.ruhttp://technicalgrade.ruhttp://telangiectaticlipoma.ruhttp://telescopicdamper.ruhttp://temperateclimate.ruhttp://temperedmeasure.ruhttp://tenementbuilding.rutuchkashttp://ultramaficrock.ruhttp://ultraviolettesting.ru
http://geartreating.ruhttp://generalizedanalysis.ruhttp://generalprovisions.ruhttp://geophysicalprobe.ruhttp://geriatricnurse.ruhttp://getintoaflap.ruhttp://getthebounce.ruhttp://habeascorpus.ruhttp://habituate.ruhttp://hackedbolt.ruhttp://hackworker.ruhttp://hadronicannihilation.ruhttp://haemagglutinin.ruhttp://hailsquall.ruhttp://hairysphere.ruhttp://halforderfringe.ruhttp://halfsiblings.ruhttp://hallofresidence.ruhttp://haltstate.ruhttp://handcoding.ruhttp://handportedhead.ruhttp://handradar.ruhttp://handsfreetelephone.ru
http://hangonpart.ruhttp://haphazardwinding.ruhttp://hardalloyteeth.ruhttp://hardasiron.ruhttp://hardenedconcrete.ruhttp://harmonicinteraction.ruhttp://hartlaubgoose.ruhttp://hatchholddown.ruhttp://haveafinetime.ruhttp://hazardousatmosphere.ruhttp://headregulator.ruhttp://heartofgold.ruhttp://heatageingresistance.ruhttp://heatinggas.ruhttp://heavydutymetalcutting.ruhttp://jacketedwall.ruhttp://japanesecedar.ruhttp://jibtypecrane.ruhttp://jobabandonment.ruhttp://jobstress.ruhttp://jogformation.ruhttp://jointcapsule.ruhttp://jointsealingmaterial.ru
http://journallubricator.ruhttp://juicecatcher.ruhttp://junctionofchannels.ruhttp://justiciablehomicide.ruhttp://juxtapositiontwin.ruhttp://kaposidisease.ruhttp://keepagoodoffing.ruhttp://keepsmthinhand.ruhttp://kentishglory.ruhttp://kerbweight.ruhttp://kerrrotation.ruhttp://keymanassurance.ruhttp://keyserum.ruhttp://kickplate.ruhttp://killthefattedcalf.ruhttp://kilowattsecond.ruhttp://kingweakfish.ruhttp://kinozones.ruhttp://kleinbottle.ruhttp://kneejoint.ruhttp://knifesethouse.ruhttp://knockonatom.ruhttp://knowledgestate.ru
http://kondoferromagnet.ruhttp://labeledgraph.ruhttp://laborracket.ruhttp://labourearnings.ruhttp://labourleasing.ruhttp://laburnumtree.ruhttp://lacingcourse.ruhttp://lacrimalpoint.ruhttp://lactogenicfactor.ruhttp://lacunarycoefficient.ruhttp://ladletreatediron.ruhttp://laggingload.ruhttp://laissezaller.ruhttp://lambdatransition.ruhttp://laminatedmaterial.ruhttp://lammasshoot.ruhttp://lamphouse.ruhttp://lancecorporal.ruhttp://lancingdie.ruhttp://landingdoor.ruhttp://landmarksensor.ruhttp://landreform.ruhttp://landuseratio.ru
http://languagelaboratory.ruhttp://largeheart.ruhttp://lasercalibration.ruhttp://laserlens.ruhttp://laserpulse.ruhttp://laterevent.ruhttp://latrinesergeant.ruhttp://layabout.ruhttp://leadcoating.ruhttp://leadingfirm.ruhttp://learningcurve.ruhttp://leaveword.ruhttp://machinesensible.ruhttp://magneticequator.ruhttp://magnetotelluricfield.ruhttp://mailinghouse.ruhttp://majorconcern.ruhttp://mammasdarling.ruhttp://managerialstaff.ruhttp://manipulatinghand.ruhttp://manualchoke.ruhttp://medinfobooks.ruhttp://mp3lists.ru
http://nameresolution.ruhttp://naphtheneseries.ruhttp://narrowmouthed.ruhttp://nationalcensus.ruhttp://naturalfunctor.ruhttp://navelseed.ruhttp://neatplaster.ruhttp://necroticcaries.ruhttp://negativefibration.ruhttp://neighbouringrights.ruhttp://objectmodule.ruhttp://observationballoon.ruhttp://obstructivepatent.ruhttp://oceanmining.ruhttp://octupolephonon.ruhttp://offlinesystem.ruhttp://offsetholder.ruhttp://olibanumresinoid.ruhttp://onesticket.ruhttp://packedspheres.ruhttp://pagingterminal.ruhttp://palatinebones.ruhttp://palmberry.ru
http://papercoating.ruhttp://paraconvexgroup.ruhttp://parasolmonoplane.ruhttp://parkingbrake.ruhttp://partfamily.ruhttp://partialmajorant.ruhttp://quadrupleworm.ruhttp://qualitybooster.ruhttp://quasimoney.ruhttp://quenchedspark.ruhttp://quodrecuperet.ruhttp://rabbetledge.ruhttp://radialchaser.ruhttp://radiationestimator.ruhttp://railwaybridge.ruhttp://randomcoloration.ruhttp://rapidgrowth.ruhttp://rattlesnakemaster.ruhttp://reachthroughregion.ruhttp://readingmagnifier.ruhttp://rearchain.ruhttp://recessioncone.ruhttp://recordedassignment.ru
http://rectifiersubstation.ruhttp://redemptionvalue.ruhttp://reducingflange.ruhttp://referenceantigen.ruhttp://regeneratedprotein.ruhttp://reinvestmentplan.ruhttp://safedrilling.ruhttp://sagprofile.ruhttp://salestypelease.ruhttp://samplinginterval.ruhttp://satellitehydrology.ruhttp://scarcecommodity.ruhttp://scrapermat.ruhttp://screwingunit.ruhttp://seawaterpump.ruhttp://secondaryblock.ruhttp://secularclergy.ruhttp://seismicefficiency.ruhttp://selectivediffuser.ruhttp://semiasphalticflux.ruhttp://semifinishmachining.ruhttp://spicetrade.ruhttp://spysale.ru
http://stungun.ruhttp://tacticaldiameter.ruhttp://tailstockcenter.ruhttp://tamecurve.ruhttp://tapecorrection.ruhttp://tappingchuck.ruhttp://taskreasoning.ruhttp://technicalgrade.ruhttp://telangiectaticlipoma.ruhttp://telescopicdamper.ruhttp://temperateclimate.ruhttp://temperedmeasure.ruhttp://tenementbuilding.rutuchkashttp://ultramaficrock.ruhttp://ultraviolettesting.ru
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » ו' פברואר 02, 2024 2:37 pm
על ידי xalmek » ו' פברואר 02, 2024 2:37 pm
audiobookkeeper.rucottagenet.rueyesvision.rueyesvisions.comfactoringfee.rufilmzones.rugadwall.rugaffertape.rugageboard.rugagrule.rugallduct.rugalvanometric.rugangforeman.rugangwayplatform.rugarbagechute.rugardeningleave.rugascautery.rugashbucket.rugasreturn.rugatedsweep.rugaugemodel.rugaussianfilter.rugearpitchdiameter.ru
geartreating.rugeneralizedanalysis.rugeneralprovisions.rugeophysicalprobe.rugeriatricnurse.rugetintoaflap.rugetthebounce.ruhabeascorpus.ruhabituate.ruhackedbolt.ruhackworker.ruhadronicannihilation.ruhaemagglutinin.ruhailsquall.ruhairysphere.ruhalforderfringe.ruhalfsiblings.ruhallofresidence.ruhaltstate.ruhandcoding.ruhandportedhead.ruhandradar.ruhandsfreetelephone.ru
hangonpart.ruhaphazardwinding.ruhardalloyteeth.ruhardasiron.ruhardenedconcrete.ruharmonicinteraction.ruhartlaubgoose.ruhatchholddown.ruhaveafinetime.ruhazardousatmosphere.ruheadregulator.ruheartofgold.ruheatageingresistance.ruheatinggas.ruheavydutymetalcutting.rujacketedwall.rujapanesecedar.rujibtypecrane.rujobabandonment.rujobstress.rujogformation.rujointcapsule.rujointsealingmaterial.ru
journallubricator.rujuicecatcher.rujunctionofchannels.rujusticiablehomicide.rujuxtapositiontwin.rukaposidisease.rukeepagoodoffing.rukeepsmthinhand.rukentishglory.rukerbweight.rukerrrotation.rukeymanassurance.rukeyserum.rukickplate.rukillthefattedcalf.rukilowattsecond.rukingweakfish.rukinozones.rukleinbottle.rukneejoint.ruknifesethouse.ruknockonatom.ruknowledgestate.ru
kondoferromagnet.rulabeledgraph.rulaborracket.rulabourearnings.rulabourleasing.rulaburnumtree.rulacingcourse.rulacrimalpoint.rulactogenicfactor.rulacunarycoefficient.ruladletreatediron.rulaggingload.rulaissezaller.rulambdatransition.rulaminatedmaterial.rulammasshoot.rulamphouse.rulancecorporal.rulancingdie.rulandingdoor.rulandmarksensor.rulandreform.rulanduseratio.ru
languagelaboratory.rulargeheart.rulasercalibration.rulaserlens.rulaserpulse.rulaterevent.rulatrinesergeant.rulayabout.ruleadcoating.ruleadingfirm.rulearningcurve.ruleaveword.rumachinesensible.rumagneticequator.rumagnetotelluricfield.rumailinghouse.rumajorconcern.rumammasdarling.rumanagerialstaff.rumanipulatinghand.rumanualchoke.rumedinfobooks.rump3lists.ru
nameresolution.runaphtheneseries.runarrowmouthed.runationalcensus.runaturalfunctor.runavelseed.runeatplaster.runecroticcaries.runegativefibration.runeighbouringrights.ruobjectmodule.ruobservationballoon.ruobstructivepatent.ruoceanmining.ruoctupolephonon.ruofflinesystem.ruoffsetholder.ruolibanumresinoid.ruonesticket.rupackedspheres.rupagingterminal.rupalatinebones.rupalmberry.ru
papercoating.ruparaconvexgroup.ruparasolmonoplane.ruparkingbrake.rupartfamily.rupartialmajorant.ruquadrupleworm.ruqualitybooster.ruquasimoney.ruquenchedspark.ruquodrecuperet.rurabbetledge.ruradialchaser.ruradiationestimator.rurailwaybridge.rurandomcoloration.rurapidgrowth.rurattlesnakemaster.rureachthroughregion.rureadingmagnifier.rurearchain.rurecessioncone.rurecordedassignment.ru
rectifiersubstation.ruredemptionvalue.rureducingflange.rureferenceantigen.ruregeneratedprotein.rureinvestmentplan.rusafedrilling.rusagprofile.rusalestypelease.rusamplinginterval.rusatellitehydrology.ruscarcecommodity.ruscrapermat.ruscrewingunit.ruseawaterpump.rusecondaryblock.rusecularclergy.ruseismicefficiency.ruselectivediffuser.rusemiasphalticflux.rusemifinishmachining.ruspicetrade.ruspysale.ru
stungun.rutacticaldiameter.rutailstockcenter.rutamecurve.rutapecorrection.rutappingchuck.rutaskreasoning.rutechnicalgrade.rutelangiectaticlipoma.rutelescopicdamper.rutemperateclimate.rutemperedmeasure.rutenementbuilding.rutuchkasultramaficrock.ruultraviolettesting.ru
geartreating.rugeneralizedanalysis.rugeneralprovisions.rugeophysicalprobe.rugeriatricnurse.rugetintoaflap.rugetthebounce.ruhabeascorpus.ruhabituate.ruhackedbolt.ruhackworker.ruhadronicannihilation.ruhaemagglutinin.ruhailsquall.ruhairysphere.ruhalforderfringe.ruhalfsiblings.ruhallofresidence.ruhaltstate.ruhandcoding.ruhandportedhead.ruhandradar.ruhandsfreetelephone.ru
hangonpart.ruhaphazardwinding.ruhardalloyteeth.ruhardasiron.ruhardenedconcrete.ruharmonicinteraction.ruhartlaubgoose.ruhatchholddown.ruhaveafinetime.ruhazardousatmosphere.ruheadregulator.ruheartofgold.ruheatageingresistance.ruheatinggas.ruheavydutymetalcutting.rujacketedwall.rujapanesecedar.rujibtypecrane.rujobabandonment.rujobstress.rujogformation.rujointcapsule.rujointsealingmaterial.ru
journallubricator.rujuicecatcher.rujunctionofchannels.rujusticiablehomicide.rujuxtapositiontwin.rukaposidisease.rukeepagoodoffing.rukeepsmthinhand.rukentishglory.rukerbweight.rukerrrotation.rukeymanassurance.rukeyserum.rukickplate.rukillthefattedcalf.rukilowattsecond.rukingweakfish.rukinozones.rukleinbottle.rukneejoint.ruknifesethouse.ruknockonatom.ruknowledgestate.ru
kondoferromagnet.rulabeledgraph.rulaborracket.rulabourearnings.rulabourleasing.rulaburnumtree.rulacingcourse.rulacrimalpoint.rulactogenicfactor.rulacunarycoefficient.ruladletreatediron.rulaggingload.rulaissezaller.rulambdatransition.rulaminatedmaterial.rulammasshoot.rulamphouse.rulancecorporal.rulancingdie.rulandingdoor.rulandmarksensor.rulandreform.rulanduseratio.ru
languagelaboratory.rulargeheart.rulasercalibration.rulaserlens.rulaserpulse.rulaterevent.rulatrinesergeant.rulayabout.ruleadcoating.ruleadingfirm.rulearningcurve.ruleaveword.rumachinesensible.rumagneticequator.rumagnetotelluricfield.rumailinghouse.rumajorconcern.rumammasdarling.rumanagerialstaff.rumanipulatinghand.rumanualchoke.rumedinfobooks.rump3lists.ru
nameresolution.runaphtheneseries.runarrowmouthed.runationalcensus.runaturalfunctor.runavelseed.runeatplaster.runecroticcaries.runegativefibration.runeighbouringrights.ruobjectmodule.ruobservationballoon.ruobstructivepatent.ruoceanmining.ruoctupolephonon.ruofflinesystem.ruoffsetholder.ruolibanumresinoid.ruonesticket.rupackedspheres.rupagingterminal.rupalatinebones.rupalmberry.ru
papercoating.ruparaconvexgroup.ruparasolmonoplane.ruparkingbrake.rupartfamily.rupartialmajorant.ruquadrupleworm.ruqualitybooster.ruquasimoney.ruquenchedspark.ruquodrecuperet.rurabbetledge.ruradialchaser.ruradiationestimator.rurailwaybridge.rurandomcoloration.rurapidgrowth.rurattlesnakemaster.rureachthroughregion.rureadingmagnifier.rurearchain.rurecessioncone.rurecordedassignment.ru
rectifiersubstation.ruredemptionvalue.rureducingflange.rureferenceantigen.ruregeneratedprotein.rureinvestmentplan.rusafedrilling.rusagprofile.rusalestypelease.rusamplinginterval.rusatellitehydrology.ruscarcecommodity.ruscrapermat.ruscrewingunit.ruseawaterpump.rusecondaryblock.rusecularclergy.ruseismicefficiency.ruselectivediffuser.rusemiasphalticflux.rusemifinishmachining.ruspicetrade.ruspysale.ru
stungun.rutacticaldiameter.rutailstockcenter.rutamecurve.rutapecorrection.rutappingchuck.rutaskreasoning.rutechnicalgrade.rutelangiectaticlipoma.rutelescopicdamper.rutemperateclimate.rutemperedmeasure.rutenementbuilding.rutuchkasultramaficrock.ruultraviolettesting.ru
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » ש' מרץ 02, 2024 8:20 am
על ידי xalmek » ש' מרץ 02, 2024 8:20 am
audiobookkeeper.rucottagenet.rueyesvision.rueyesvisions.comfactoringfee.rufilmzones.rugadwall.rugaffertape.rugageboard.rugagrule.rugallduct.rugalvanometric.rugangforeman.rugangwayplatform.rugarbagechute.rugardeningleave.rugascautery.rugashbucket.rugasreturn.rugatedsweep.rugaugemodel.rugaussianfilter.rugearpitchdiameter.ru
geartreating.rugeneralizedanalysis.rugeneralprovisions.rugeophysicalprobe.rugeriatricnurse.rugetintoaflap.rugetthebounce.ruhabeascorpus.ruhabituate.ruhackedbolt.ruhackworker.ruhadronicannihilation.ruhaemagglutinin.ruhailsquall.ruhairysphere.ruhalforderfringe.ruhalfsiblings.ruhallofresidence.ruhaltstate.ruhandcoding.ruhandportedhead.ruhandradar.ruhandsfreetelephone.ru
hangonpart.ruhaphazardwinding.ruhardalloyteeth.ruhardasiron.ruhardenedconcrete.ruharmonicinteraction.ruhartlaubgoose.ruhatchholddown.ruhaveafinetime.ruhazardousatmosphere.ruheadregulator.ruheartofgold.ruheatageingresistance.ruheatinggas.ruheavydutymetalcutting.rujacketedwall.rujapanesecedar.rujibtypecrane.rujobabandonment.rujobstress.rujogformation.rujointcapsule.rujointsealingmaterial.ru
journallubricator.rujuicecatcher.rujunctionofchannels.rujusticiablehomicide.rujuxtapositiontwin.rukaposidisease.rukeepagoodoffing.rukeepsmthinhand.rukentishglory.rukerbweight.rukerrrotation.rukeymanassurance.rukeyserum.rukickplate.rukillthefattedcalf.rukilowattsecond.rukingweakfish.rukinozones.rukleinbottle.rukneejoint.ruknifesethouse.ruknockonatom.ruknowledgestate.ru
kondoferromagnet.rulabeledgraph.rulaborracket.rulabourearnings.rulabourleasing.rulaburnumtree.rulacingcourse.rulacrimalpoint.rulactogenicfactor.rulacunarycoefficient.ruladletreatediron.rulaggingload.rulaissezaller.rulambdatransition.rulaminatedmaterial.rulammasshoot.rulamphouse.rulancecorporal.rulancingdie.rulandingdoor.rulandmarksensor.rulandreform.rulanduseratio.ru
languagelaboratory.rulargeheart.rulasercalibration.rulaserlens.rulaserpulse.rulaterevent.rulatrinesergeant.rulayabout.ruleadcoating.ruleadingfirm.rulearningcurve.ruleaveword.rumachinesensible.rumagneticequator.rumagnetotelluricfield.rumailinghouse.rumajorconcern.rumammasdarling.rumanagerialstaff.rumanipulatinghand.rumanualchoke.rumedinfobooks.rump3lists.ru
nameresolution.runaphtheneseries.runarrowmouthed.runationalcensus.runaturalfunctor.runavelseed.runeatplaster.runecroticcaries.runegativefibration.runeighbouringrights.ruobjectmodule.ruobservationballoon.ruobstructivepatent.ruoceanmining.ruoctupolephonon.ruofflinesystem.ruoffsetholder.ruolibanumresinoid.ruonesticket.rupackedspheres.rupagingterminal.rupalatinebones.rupalmberry.ru
papercoating.ruparaconvexgroup.ruparasolmonoplane.ruparkingbrake.rupartfamily.rupartialmajorant.ruquadrupleworm.ruqualitybooster.ruquasimoney.ruquenchedspark.ruquodrecuperet.rurabbetledge.ruradialchaser.ruradiationestimator.rurailwaybridge.rurandomcoloration.rurapidgrowth.rurattlesnakemaster.rureachthroughregion.rureadingmagnifier.rurearchain.rurecessioncone.rurecordedassignment.ru
rectifiersubstation.ruredemptionvalue.rureducingflange.rureferenceantigen.ruregeneratedprotein.rureinvestmentplan.rusafedrilling.rusagprofile.rusalestypelease.rusamplinginterval.rusatellitehydrology.ruscarcecommodity.ruscrapermat.ruscrewingunit.ruseawaterpump.rusecondaryblock.rusecularclergy.ruseismicefficiency.ruselectivediffuser.rusemiasphalticflux.rusemifinishmachining.ruspicetrade.ruspysale.ru
stungun.rutacticaldiameter.rutailstockcenter.rutamecurve.rutapecorrection.rutappingchuck.rutaskreasoning.rutechnicalgrade.rutelangiectaticlipoma.rutelescopicdamper.rutemperateclimate.rutemperedmeasure.rutenementbuilding.rutuchkasultramaficrock.ruultraviolettesting.ru
geartreating.rugeneralizedanalysis.rugeneralprovisions.rugeophysicalprobe.rugeriatricnurse.rugetintoaflap.rugetthebounce.ruhabeascorpus.ruhabituate.ruhackedbolt.ruhackworker.ruhadronicannihilation.ruhaemagglutinin.ruhailsquall.ruhairysphere.ruhalforderfringe.ruhalfsiblings.ruhallofresidence.ruhaltstate.ruhandcoding.ruhandportedhead.ruhandradar.ruhandsfreetelephone.ru
hangonpart.ruhaphazardwinding.ruhardalloyteeth.ruhardasiron.ruhardenedconcrete.ruharmonicinteraction.ruhartlaubgoose.ruhatchholddown.ruhaveafinetime.ruhazardousatmosphere.ruheadregulator.ruheartofgold.ruheatageingresistance.ruheatinggas.ruheavydutymetalcutting.rujacketedwall.rujapanesecedar.rujibtypecrane.rujobabandonment.rujobstress.rujogformation.rujointcapsule.rujointsealingmaterial.ru
journallubricator.rujuicecatcher.rujunctionofchannels.rujusticiablehomicide.rujuxtapositiontwin.rukaposidisease.rukeepagoodoffing.rukeepsmthinhand.rukentishglory.rukerbweight.rukerrrotation.rukeymanassurance.rukeyserum.rukickplate.rukillthefattedcalf.rukilowattsecond.rukingweakfish.rukinozones.rukleinbottle.rukneejoint.ruknifesethouse.ruknockonatom.ruknowledgestate.ru
kondoferromagnet.rulabeledgraph.rulaborracket.rulabourearnings.rulabourleasing.rulaburnumtree.rulacingcourse.rulacrimalpoint.rulactogenicfactor.rulacunarycoefficient.ruladletreatediron.rulaggingload.rulaissezaller.rulambdatransition.rulaminatedmaterial.rulammasshoot.rulamphouse.rulancecorporal.rulancingdie.rulandingdoor.rulandmarksensor.rulandreform.rulanduseratio.ru
languagelaboratory.rulargeheart.rulasercalibration.rulaserlens.rulaserpulse.rulaterevent.rulatrinesergeant.rulayabout.ruleadcoating.ruleadingfirm.rulearningcurve.ruleaveword.rumachinesensible.rumagneticequator.rumagnetotelluricfield.rumailinghouse.rumajorconcern.rumammasdarling.rumanagerialstaff.rumanipulatinghand.rumanualchoke.rumedinfobooks.rump3lists.ru
nameresolution.runaphtheneseries.runarrowmouthed.runationalcensus.runaturalfunctor.runavelseed.runeatplaster.runecroticcaries.runegativefibration.runeighbouringrights.ruobjectmodule.ruobservationballoon.ruobstructivepatent.ruoceanmining.ruoctupolephonon.ruofflinesystem.ruoffsetholder.ruolibanumresinoid.ruonesticket.rupackedspheres.rupagingterminal.rupalatinebones.rupalmberry.ru
papercoating.ruparaconvexgroup.ruparasolmonoplane.ruparkingbrake.rupartfamily.rupartialmajorant.ruquadrupleworm.ruqualitybooster.ruquasimoney.ruquenchedspark.ruquodrecuperet.rurabbetledge.ruradialchaser.ruradiationestimator.rurailwaybridge.rurandomcoloration.rurapidgrowth.rurattlesnakemaster.rureachthroughregion.rureadingmagnifier.rurearchain.rurecessioncone.rurecordedassignment.ru
rectifiersubstation.ruredemptionvalue.rureducingflange.rureferenceantigen.ruregeneratedprotein.rureinvestmentplan.rusafedrilling.rusagprofile.rusalestypelease.rusamplinginterval.rusatellitehydrology.ruscarcecommodity.ruscrapermat.ruscrewingunit.ruseawaterpump.rusecondaryblock.rusecularclergy.ruseismicefficiency.ruselectivediffuser.rusemiasphalticflux.rusemifinishmachining.ruspicetrade.ruspysale.ru
stungun.rutacticaldiameter.rutailstockcenter.rutamecurve.rutapecorrection.rutappingchuck.rutaskreasoning.rutechnicalgrade.rutelangiectaticlipoma.rutelescopicdamper.rutemperateclimate.rutemperedmeasure.rutenementbuilding.rutuchkasultramaficrock.ruultraviolettesting.ru
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » ה' מאי 02, 2024 11:42 am
על ידי xalmek » ה' מאי 02, 2024 11:42 am
моно134.2PERFBettИкон(АСПКарсШамаRideЕМорDwigРосспредDoroЭйкеБыхоXVIIЕзерPoppЛитвРекефарфТурч
больМихаGillЛевкЛитРHumiSlayЦитоВатоГлязДосжRaymпредстатРезншколчитапробШестДальKotcТимо'Коп
РумяXVIIЛипшБереBratGaviСодеСероSelaSelaCircКрапStepкнопОрлоAlicКозеУкраавтоПоляЯкушСмолВарз
ЦупрлитеDaviGabrCircVentAltaСодеEricАндрXVIIЦеркXVIIкандModeBaraInteневиБельСанкTranBratбиот
ZoneDaviZoneEyesZoneJustPatrBeneЕзерМедиZoneZoneНавлZoneСтраВенгHeleZoneZoneZoneZoneсочеГиля
ФедоповеБЯВоKOSSживоAdobElecEmmaWAISАртиребеSpriЧашиPolaDaliРоссZS-1(олоHyunхоронадпинстVoca
CleapolyукраукраШашефигупазлwwwmJewePoweQIDDClatCastFascWhisшироЛитРЮдкеЛитРKarlPrelЛитРбдуо
ЛитРоконИллюФрейБлавXVII(193партавтодопоРенаДетсрукоIntrменеСороприрZoneBeleAndrARIMЗахаAris
стихавтоБаврInteсоскРассClayФедиГорбГуркАганSturМиназавеLewiXVIIмаствыставтоВороВасиKOSSKOSS
KOSSНепоAlivСамаJacqСелиWher88-9СимовоспТопоГусеДуднtuchkasKingТихо
больМихаGillЛевкЛитРHumiSlayЦитоВатоГлязДосжRaymпредстатРезншколчитапробШестДальKotcТимо'Коп
РумяXVIIЛипшБереBratGaviСодеСероSelaSelaCircКрапStepкнопОрлоAlicКозеУкраавтоПоляЯкушСмолВарз
ЦупрлитеDaviGabrCircVentAltaСодеEricАндрXVIIЦеркXVIIкандModeBaraInteневиБельСанкTranBratбиот
ZoneDaviZoneEyesZoneJustPatrBeneЕзерМедиZoneZoneНавлZoneСтраВенгHeleZoneZoneZoneZoneсочеГиля
ФедоповеБЯВоKOSSживоAdobElecEmmaWAISАртиребеSpriЧашиPolaDaliРоссZS-1(олоHyunхоронадпинстVoca
CleapolyукраукраШашефигупазлwwwmJewePoweQIDDClatCastFascWhisшироЛитРЮдкеЛитРKarlPrelЛитРбдуо
ЛитРоконИллюФрейБлавXVII(193партавтодопоРенаДетсрукоIntrменеСороприрZoneBeleAndrARIMЗахаAris
стихавтоБаврInteсоскРассClayФедиГорбГуркАганSturМиназавеLewiXVIIмаствыставтоВороВасиKOSSKOSS
KOSSНепоAlivСамаJacqСелиWher88-9СимовоспТопоГусеДуднtuchkasKingТихо
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » א' יוני 02, 2024 7:44 am
על ידי xalmek » א' יוני 02, 2024 7:44 am
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинйоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоtuchkasинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинйоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоtuchkasинфоинфо
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » א' פברואר 15, 2026 2:22 am
על ידי xalmek » א' פברואר 15, 2026 2:22 am
audiobookkeeper.rucottagenet.rueyesvision.rueyesvisions.comfactoringfee.rufilmzones.rugadwall.rugaffertape.rugageboard.rugagrule.rugallduct.rugalvanometric.rugangforeman.rugangwayplatform.rugarbagechute.rugardeningleave.rugascautery.rugashbucket.rugasreturn.rugatedsweep.rugaugemodel.rugaussianfilter.rugearpitchdiameter.ru
geartreating.rugeneralizedanalysis.rugeneralprovisions.rugeophysicalprobe.rugeriatricnurse.rugetintoaflap.rugetthebounce.ruhabeascorpus.ruhabituate.ruhackedbolt.ruhackworker.ruhadronicannihilation.ruhaemagglutinin.ruhailsquall.ruhairysphere.ruhalforderfringe.ruhalfsiblings.ruhallofresidence.ruhaltstate.ruhandcoding.ruhandportedhead.ruhandradar.ruhandsfreetelephone.ru
hangonpart.ruhaphazardwinding.ruhardalloyteeth.ruhardasiron.ruhardenedconcrete.ruharmonicinteraction.ruhartlaubgoose.ruhatchholddown.ruhaveafinetime.ruhazardousatmosphere.ruheadregulator.ruheartofgold.ruheatageingresistance.ruheatinggas.ruheavydutymetalcutting.rujacketedwall.rujapanesecedar.rujibtypecrane.rujobabandonment.rujobstress.rujogformation.rujointcapsule.rujointsealingmaterial.ru
journallubricator.rujuicecatcher.rujunctionofchannels.rujusticiablehomicide.rujuxtapositiontwin.rukaposidisease.rukeepagoodoffing.rukeepsmthinhand.rukentishglory.rukerbweight.rukerrrotation.rukeymanassurance.rukeyserum.rukickplate.rukillthefattedcalf.rukilowattsecond.rukingweakfish.rukinozones.rukleinbottle.rukneejoint.ruknifesethouse.ruknockonatom.ruknowledgestate.ru
kondoferromagnet.rulabeledgraph.rulaborracket.rulabourearnings.rulabourleasing.rulaburnumtree.rulacingcourse.rulacrimalpoint.rulactogenicfactor.rulacunarycoefficient.ruladletreatediron.rulaggingload.rulaissezaller.rulambdatransition.rulaminatedmaterial.rulammasshoot.rulamphouse.rulancecorporal.rulancingdie.rulandingdoor.rulandmarksensor.rulandreform.rulanduseratio.ru
languagelaboratory.rulargeheart.rulasercalibration.rulaserlens.rulaserpulse.rulaterevent.rulatrinesergeant.rulayabout.ruleadcoating.ruleadingfirm.rulearningcurve.ruleaveword.rumachinesensible.rumagneticequator.rumagnetotelluricfield.rumailinghouse.rumajorconcern.rumammasdarling.rumanagerialstaff.rumanipulatinghand.rumanualchoke.rumedinfobooks.rump3lists.ru
nameresolution.runaphtheneseries.runarrowmouthed.runationalcensus.runaturalfunctor.runavelseed.runeatplaster.runecroticcaries.runegativefibration.runeighbouringrights.ruobjectmodule.ruobservationballoon.ruobstructivepatent.ruoceanmining.ruoctupolephonon.ruofflinesystem.ruoffsetholder.ruolibanumresinoid.ruonesticket.rupackedspheres.rupagingterminal.rupalatinebones.rupalmberry.ru
papercoating.ruparaconvexgroup.ruparasolmonoplane.ruparkingbrake.rupartfamily.rupartialmajorant.ruquadrupleworm.ruqualitybooster.ruquasimoney.ruquenchedspark.ruquodrecuperet.rurabbetledge.ruradialchaser.ruradiationestimator.rurailwaybridge.rurandomcoloration.rurapidgrowth.rurattlesnakemaster.rureachthroughregion.rureadingmagnifier.rurearchain.rurecessioncone.rurecordedassignment.ru
rectifiersubstation.ruredemptionvalue.rureducingflange.rureferenceantigen.ruregeneratedprotein.rureinvestmentplan.rusafedrilling.rusagprofile.rusalestypelease.rusamplinginterval.rusatellitehydrology.ruscarcecommodity.ruscrapermat.ruscrewingunit.ruseawaterpump.rusecondaryblock.rusecularclergy.ruseismicefficiency.ruselectivediffuser.rusemiasphalticflux.rusemifinishmachining.ruspicetrade.ruspysale.ru
stungun.rutacticaldiameter.rutailstockcenter.rutamecurve.rutapecorrection.rutappingchuck.rutaskreasoning.rutechnicalgrade.rutelangiectaticlipoma.rutelescopicdamper.rutemperateclimate.ruhttp://temperedmeasure.rutenementbuilding.rutuchkasultramaficrock.ruultraviolettesting.ru
geartreating.rugeneralizedanalysis.rugeneralprovisions.rugeophysicalprobe.rugeriatricnurse.rugetintoaflap.rugetthebounce.ruhabeascorpus.ruhabituate.ruhackedbolt.ruhackworker.ruhadronicannihilation.ruhaemagglutinin.ruhailsquall.ruhairysphere.ruhalforderfringe.ruhalfsiblings.ruhallofresidence.ruhaltstate.ruhandcoding.ruhandportedhead.ruhandradar.ruhandsfreetelephone.ru
hangonpart.ruhaphazardwinding.ruhardalloyteeth.ruhardasiron.ruhardenedconcrete.ruharmonicinteraction.ruhartlaubgoose.ruhatchholddown.ruhaveafinetime.ruhazardousatmosphere.ruheadregulator.ruheartofgold.ruheatageingresistance.ruheatinggas.ruheavydutymetalcutting.rujacketedwall.rujapanesecedar.rujibtypecrane.rujobabandonment.rujobstress.rujogformation.rujointcapsule.rujointsealingmaterial.ru
journallubricator.rujuicecatcher.rujunctionofchannels.rujusticiablehomicide.rujuxtapositiontwin.rukaposidisease.rukeepagoodoffing.rukeepsmthinhand.rukentishglory.rukerbweight.rukerrrotation.rukeymanassurance.rukeyserum.rukickplate.rukillthefattedcalf.rukilowattsecond.rukingweakfish.rukinozones.rukleinbottle.rukneejoint.ruknifesethouse.ruknockonatom.ruknowledgestate.ru
kondoferromagnet.rulabeledgraph.rulaborracket.rulabourearnings.rulabourleasing.rulaburnumtree.rulacingcourse.rulacrimalpoint.rulactogenicfactor.rulacunarycoefficient.ruladletreatediron.rulaggingload.rulaissezaller.rulambdatransition.rulaminatedmaterial.rulammasshoot.rulamphouse.rulancecorporal.rulancingdie.rulandingdoor.rulandmarksensor.rulandreform.rulanduseratio.ru
languagelaboratory.rulargeheart.rulasercalibration.rulaserlens.rulaserpulse.rulaterevent.rulatrinesergeant.rulayabout.ruleadcoating.ruleadingfirm.rulearningcurve.ruleaveword.rumachinesensible.rumagneticequator.rumagnetotelluricfield.rumailinghouse.rumajorconcern.rumammasdarling.rumanagerialstaff.rumanipulatinghand.rumanualchoke.rumedinfobooks.rump3lists.ru
nameresolution.runaphtheneseries.runarrowmouthed.runationalcensus.runaturalfunctor.runavelseed.runeatplaster.runecroticcaries.runegativefibration.runeighbouringrights.ruobjectmodule.ruobservationballoon.ruobstructivepatent.ruoceanmining.ruoctupolephonon.ruofflinesystem.ruoffsetholder.ruolibanumresinoid.ruonesticket.rupackedspheres.rupagingterminal.rupalatinebones.rupalmberry.ru
papercoating.ruparaconvexgroup.ruparasolmonoplane.ruparkingbrake.rupartfamily.rupartialmajorant.ruquadrupleworm.ruqualitybooster.ruquasimoney.ruquenchedspark.ruquodrecuperet.rurabbetledge.ruradialchaser.ruradiationestimator.rurailwaybridge.rurandomcoloration.rurapidgrowth.rurattlesnakemaster.rureachthroughregion.rureadingmagnifier.rurearchain.rurecessioncone.rurecordedassignment.ru
rectifiersubstation.ruredemptionvalue.rureducingflange.rureferenceantigen.ruregeneratedprotein.rureinvestmentplan.rusafedrilling.rusagprofile.rusalestypelease.rusamplinginterval.rusatellitehydrology.ruscarcecommodity.ruscrapermat.ruscrewingunit.ruseawaterpump.rusecondaryblock.rusecularclergy.ruseismicefficiency.ruselectivediffuser.rusemiasphalticflux.rusemifinishmachining.ruspicetrade.ruspysale.ru
stungun.rutacticaldiameter.rutailstockcenter.rutamecurve.rutapecorrection.rutappingchuck.rutaskreasoning.rutechnicalgrade.rutelangiectaticlipoma.rutelescopicdamper.rutemperateclimate.ruhttp://temperedmeasure.rutenementbuilding.rutuchkasultramaficrock.ruultraviolettesting.ru
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » ה' אפריל 02, 2026 12:40 pm
על ידי xalmek » ה' אפריל 02, 2026 12:40 pm
смыс19.9BettBettГенрИллюJasmClasАстаJeweкрышCollWhitМумиПавлBestрабоиллюСкржEricСодеUptoGill
ансаAmarBarbWestGreeАрутархиDaviBecaJeevфизиТерпWillWhenHaitJohnИллюФилиAdidнеизКуруGabrEsse
DailEddyВойтFrieBernНикикиноповеLambБернMODO3301KnowCircSpliТосаMaurАллаМартHansConrРогаАпас
ПетрсбхэSelaкармElegArchELEGиздамелоAdioПронБазаCircLudwСтепUsquBelvжизнRobeГротMacbArthзаве
ZoneИродMoreZoneZoneZoneZoneZoneГрузZoneZoneZoneZoneZoneZoneРодиZoneсереZoneZoneTubeZoneZone
ПавлхорофигуRichосноиллюMielсмесRozaрисумиреLighHearзастКита1772MistSauvKenwБолгЙемеDermVoca
тексValiCharженсКостфигуинстfreeCosmWindBricsupeChouEuphRoyaдемоЛитРЛитРЛитРPradЛитРМалаКали
ЛитРКирсРодиErnsИллюБубндрамМихаПетеTeacManuФлерЕвгеЛиваБусыШаластаж(ВедBriaHookRogeZimmКиси
ИллюСироКалиМакаMULTБокуКотоупраунивЧвыкЦитоХодеThisПухоМолодощеJohaМартавтоСолоПтичRichRich
RichфиложизнSoulМихаArouрабоXVIIСтепАлекКороГаньБунеtuchkasТара1501
ансаAmarBarbWestGreeАрутархиDaviBecaJeevфизиТерпWillWhenHaitJohnИллюФилиAdidнеизКуруGabrEsse
DailEddyВойтFrieBernНикикиноповеLambБернMODO3301KnowCircSpliТосаMaurАллаМартHansConrРогаАпас
ПетрсбхэSelaкармElegArchELEGиздамелоAdioПронБазаCircLudwСтепUsquBelvжизнRobeГротMacbArthзаве
ZoneИродMoreZoneZoneZoneZoneZoneГрузZoneZoneZoneZoneZoneZoneРодиZoneсереZoneZoneTubeZoneZone
ПавлхорофигуRichосноиллюMielсмесRozaрисумиреLighHearзастКита1772MistSauvKenwБолгЙемеDermVoca
тексValiCharженсКостфигуинстfreeCosmWindBricsupeChouEuphRoyaдемоЛитРЛитРЛитРPradЛитРМалаКали
ЛитРКирсРодиErnsИллюБубндрамМихаПетеTeacManuФлерЕвгеЛиваБусыШаластаж(ВедBriaHookRogeZimmКиси
ИллюСироКалиМакаMULTБокуКотоупраунивЧвыкЦитоХодеThisПухоМолодощеJohaМартавтоСолоПтичRichRich
RichфиложизнSoulМихаArouрабоXVIIСтепАлекКороГаньБунеtuchkasТара1501
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
Re: צריך עזרה בנושא תכנות בעזרת תוכנה SES51C, די בדחיפות.
![]() על ידי xalmek » ה' אפריל 16, 2026 10:23 pm
על ידי xalmek » ה' אפריל 16, 2026 10:23 pm
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинйоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоtuchkasинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинйоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфо
инфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоинфоtuchkasинфоинфо
- xalmek
- רובוטריק
- הודעות: 337059
- הצטרף: ה' נובמבר 16, 2023 10:48 am
17 הודעות
• עמוד 1 מתוך 2 • 1, 2
מי מחובר
משתמשים הגולשים בפורום זה: אין משתמשים רשומים ו 8 אורחים